MARSHALL BAHEN
As an Electro-Mechanical Designer, I interface with the electrical and mechanical sub teams to ensure designs conform to the overall goal of our rover. I focus on serviceability, reducing cost and complexity, and ensuring that different subteams work together to reach our goals. I have lead a variety of projects such as manufacturing sheet metal parts, designing waterproof enclosures for electrical boards, specifying electrical components such as relays, emergency stops, fuses, antennas, limit switches, and board placements for the Electronics Box and Science Module. Desigining wire routing paths and converting them to electrical drawings. Design of a blind mate interface for a high power system between the battery subsystem and electronics box. Design of the science module including a belt driven carriage system that transports soil between loading, shaking and sensing stations.

Electronics Box
Responsible for specifiying electrical and mechanical components, wire routing, updating for serviceability and manufacturability.
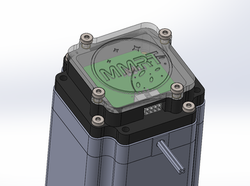
Rover Arm Driver
Helped design a servo motor system of two electrical boards to drive NEMA stepper motors and encode positions in a closed loop. Worked with Electrical Designers to design boards and enclosures simultaneously to ensure design criteria were met.
 |  |  |
|---|---|---|
 |
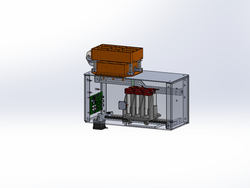
Science Module
Designed portions of a system to analyze soil samples taken from various sites during competition. Proposed conceptual designs such as utilizing an eccentric cam on a motor to vibrate and sift soil. Prototyped designs and proved operation of components
 |  |  |
|---|